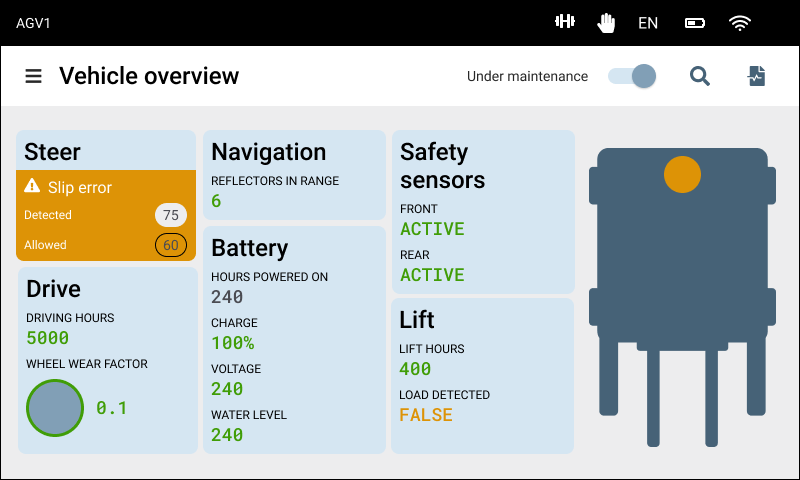
Dematic is a major player in automated vehicles (AGV’s) such as forklifts. They asked us to work on the conceptual design of the on-board controller: an application accessible through a touch screen on the vehicle, used to provide information about its status and enable its calibration.
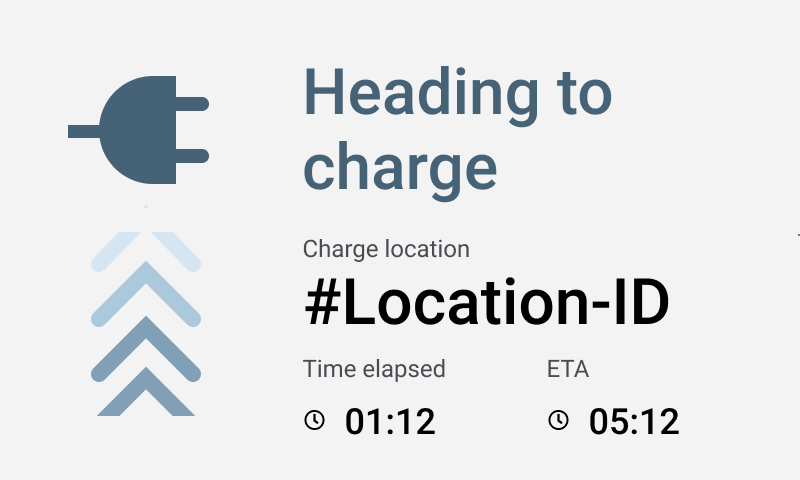
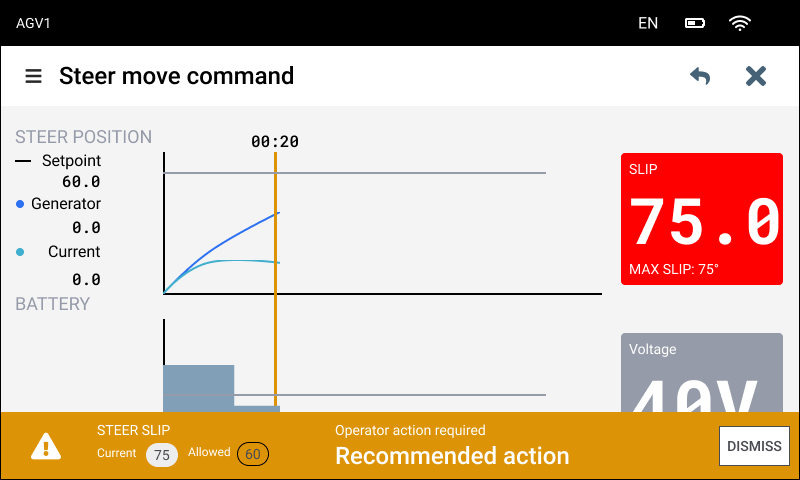
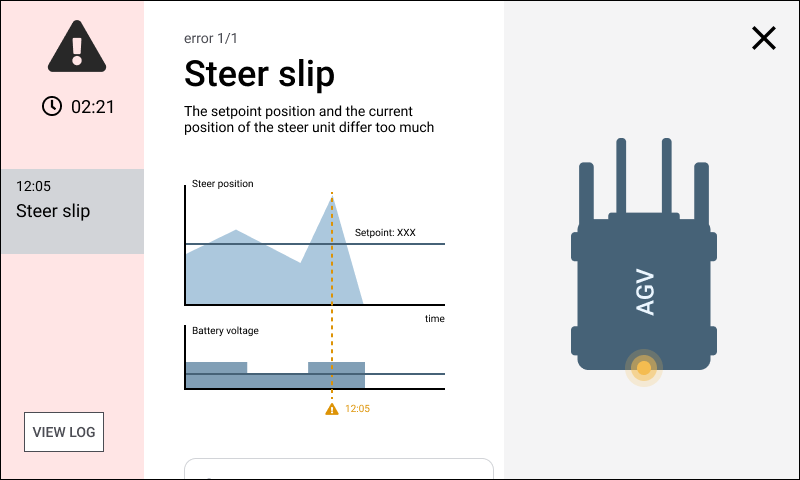
This application is very different from a typical app. In best case scenario, the user should not interact with the application at all. In worst case scenario, the users must notice that something is going wrong from a distance and easily receive troubleshooting guidance.
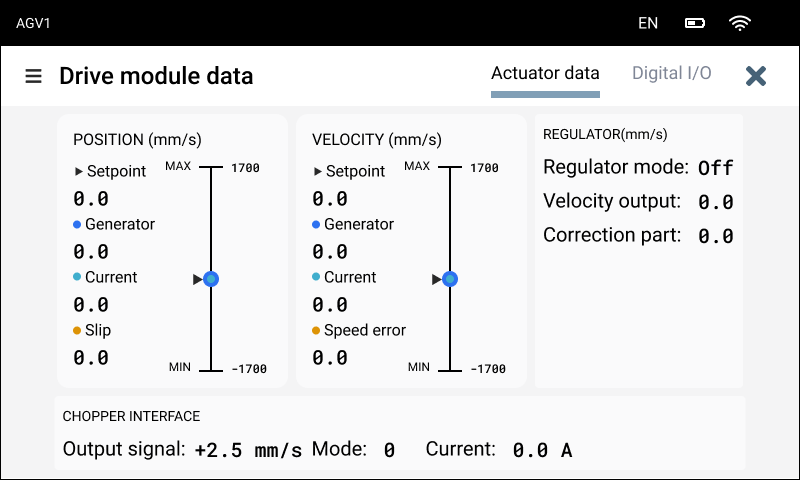
The interaction paradigm is very different from the perspective of service and maintenance. Users rely on it a lot and need to be able to navigate to and calibrate a lot of different parameters.
Lead a rotating team of designers and researchers
Project management
Co-design workshops
Field studies
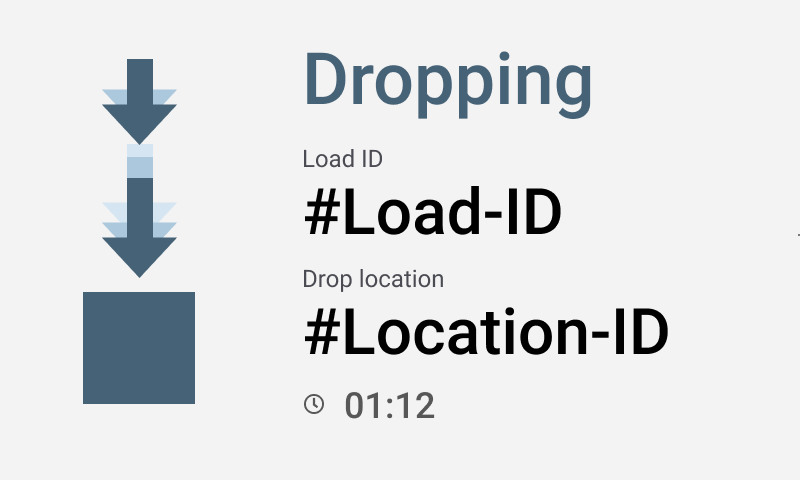
Conceptual design
Documentation
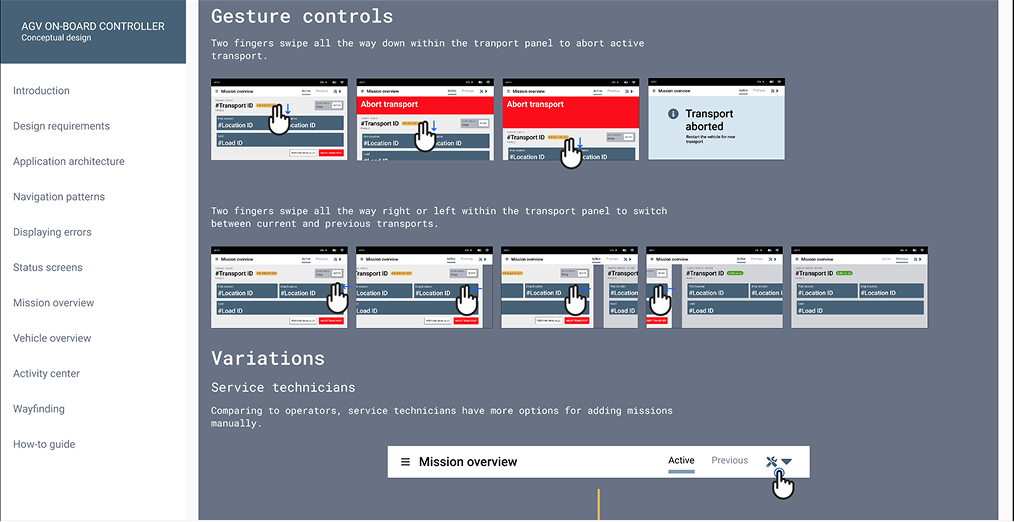
As our project sponsors had to present our work to various stakeholders after the end of the project, one of our final deliverables was a Figma prototype documenting the entire concept.
STEFANOS MONASTIRIDIS
0032485654553 STEFANOS@STMN-DESIGN.COM
LINKEDIN